边缘计算
挑战:使用基于云的图像处理可能会增加延迟和网络流量。 它还会带来隐私和安全风险。
解决方案:
使用边缘计算,在数据源处将图像数据处理为可操作信息。 FLIR 可通过具备以下性能的相机提供帮助:
•在有挑战性的条件中提供可靠且详细的图像捕获
•提供 IEEE1588 兼容性以轻松同步相机
• ARM 和 x64 平台的
嵌入式系统边缘计算的全 SDK 支持,含 FLIR 相机
边缘计算快速介绍
边缘计算 是一种网络模型 ,其中数据处理发生于网络边缘、靠近数据源。有了边缘计算,便无需将图像数据发送到中央服务器或云服务以供处理。 例如,对于用于道路通行费收费的边缘计算,将支持系统对接近相机的低功耗单板计算机执行车牌识别。 将仅传输车牌号而不是车辆或道路的整个图像。 当前,通过经济实惠且功能强大的单板计算机即可实现。 FLIR 的 Spinnaker SDK 支持 X64 和 ARM 硬件,以及许多第三方视觉库,因此无需考虑兼容性。 借助跨平台支持方式,可以轻松在熟悉的桌面环境中开发应用并将其部署到嵌入式系统。
边缘计算的主要优势
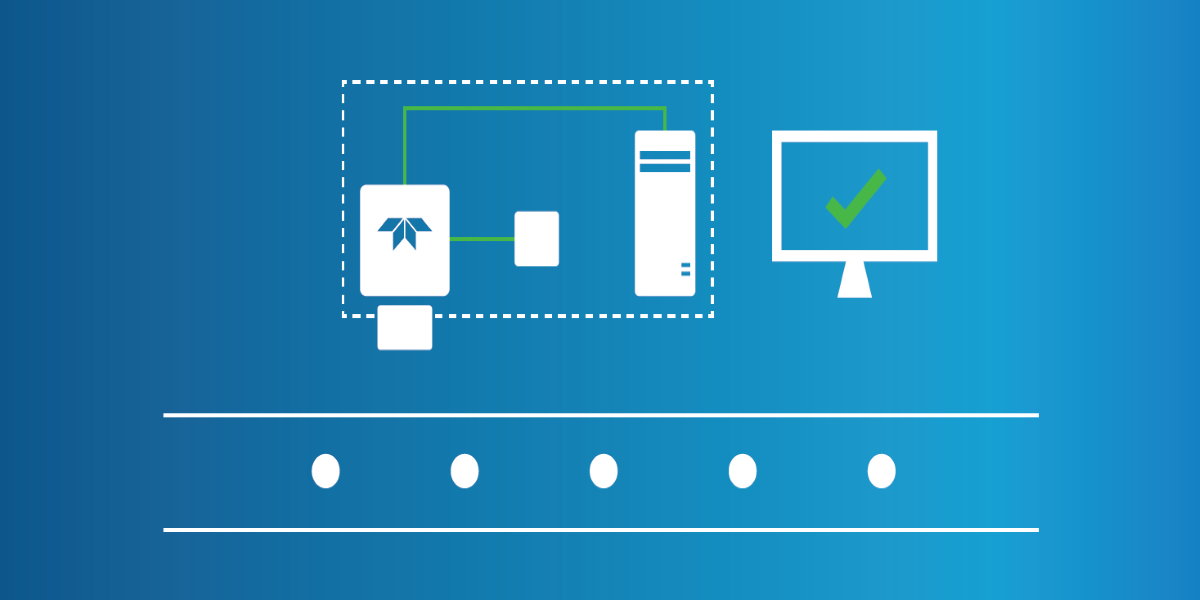
通过减少数据源和目标之间的交换机和主机数量,在边缘处理图像数据降低了系统延迟和抖动。 数据包经过的每个网络节点都会增加图像采集和操作之间的延迟。 边缘计算消除了上传图像数据耗时造成的延迟,从而降低了系统延迟。 为增强系统安全性和减轻隐私顾虑,边缘节点可以对发送到云的数据进行匿名化处理以供进一步分析。

图 1: 边缘计算处理接近低系统延迟来源的图像数据
图 2: 云计算导致图像数据的信号路径长
| 减小带宽 | 在数据源位置处理数据无需将图像传输回中心服务器。 因为仅发送可操作信息,所以需要非常少的带宽。 |
| 缩短延迟 | 减少从边缘发出的数据量可以提升系统速度,并将图像捕获和信息到达之间的延迟缩短至最低。 |
| 提升隐私和安全性 | 不会将敏感信息(如车牌和人脸)传输到云。 |
何时使用边缘计算
去中心化边缘计算网络用于处理由物联网生成的不断增加的数据量,这有时称为雾计算。 在雾计算模型中,不会消除云计算,但其在系统中的角色会变动。 边缘节点用于计算机到计算机的低延迟通信,而云用于更复杂的数据分析,例如包括广泛的地理区域或更长的时间范围的数据分析。
在设计边缘计算系统时,关键的决定是将哪些数据传递到云以供进一步分析或长期存储。 最长达几秒的时间范围所需的信息应在边缘处进行处理和操作,而对更长时间范围内数据的分析可以发送到云,并且对系统没有延迟处罚。
| 应用 | 优点 |
| 智能流量系统 | 带宽消耗降低、系统安全性提高以及隐私风险降至最低 |
| 工业自动化 | 降低延迟和抖动以实现更高的吞吐量 |
| 自主车辆指南 | 将系统延迟降到最低以快速于高速车辆上作出决策,同时无需依赖始终打开的数据连接 |
FLIR 机器视觉相机支持边缘计算
FLIR 相机简化了用于边缘的视觉应用的开发。 通过将最新的 CMOS 传感器与高级自动控制的算法进行配对以校正和曝光颜色,FLIR 相机在充满挑战性的光线条件下也能可靠地捕获详细图像。FLIR Blackfly S 相机功能 Sony Pregius 传感器。 它们凭借高量子效率和低读取噪声,使得这些传感器可以在低光条件下捕获清晰的低噪声图像。 使用宽动态范围确保在高对比度场景的阴影和明亮区域都能捕获细节。

FLIR 相机具有强大的板载图像处理功能,包括颜色内插、锐化和伽玛矫正,从而降低了主机端的处理要求。 对 IEEE 1588 精确时间协议的支持可以通过其他启用 IEEE 1588 的设备轻松将 GigE Blackfly S 同步到常用的时间基准。
Spinnaker SDK 兼容性
因为支持基于 x64 和 ARM 的系统,由 Spinnaker SDK 提供技术支持的 FLIR 相机可以部署到大量现有的硬件。 跨平台支持提供在 x64 Windows 和 Linux 上的一致用户体验。
| ARM64 | X64 | |
| Windows 7/8/10 | 没有 | 有 |
| Ubuntu 14.01/16.04 | 有 | 有 |
| LinuxGUI | 没有 | 有 |
更多帮助资源
如果要比较我们相机的 EMVA 1288 成像性能,请访问我们的在线传感器比较工具和相机选择器页。
有关 EMVA 1288 成像性能术语(量子效率和动态范围等)的定义,请访问 EMVA 1288 综述。